Masters Project (Published)
My project proposed using road-side video cameras as a non-intrusive alternative to current ITS and info-mobility systems.
A neural network was used for object detection and custom software was developed to calibrate the camera using road markings.
The project proved successful and was able to provide vehicle speeds in real-time from road-side camera footage.
This led to a publication in the International Journal of Intelligent Transportation Systems Research.
Project was supported by Q-Free ASA.

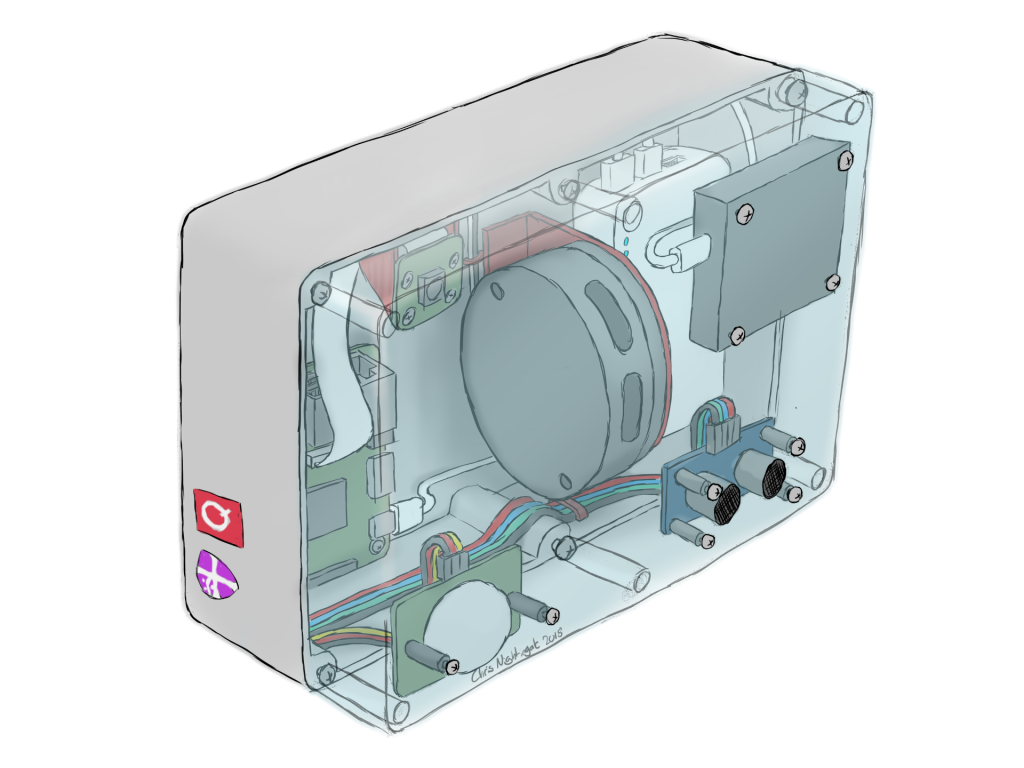
Q-Free Internship
This was the continuation of a successful third year design project. I designed and developed an innovative prototype for a non-intrusive roadside detection system for counting and classifying vehicles. I also developed software in Python and C to generate 2D side profiles of vehicles using data from LiDAR and radar sensors.
Supporting Software for Mathematics Publication
I jointly developed a computer classification algorithm that generated all radius two local configurations of quartic graphs. The algorithm filtered these by removing all isomorphic graphs and calculated the curvature of the centre of each unique graph in the remaining set. These results formed the basis of an academic paper entitled Quartic Graphs that are Bakry-Émery Curvature Sharp which was published in Discrete Mathematics 343(3).


